
Assistive Wearable Robotics: Healthcare’s New Clothes
by Denis Huen, Jindong Liu, and Benny Lo
Inspired by exoskeleton animals, a new form of robotics—wearable robots—have recently been introduced and attracted much attention with applications that range from enabling patients with paraplegia to walk to introducing superhuman capabilities. There are mainly two types of wearable robots: exoskeletons and soft exosuits, where the primary difference is the material used for the structure of the robot. In general, wearable robots are designed for enhancing the user’s physical performance, such as strength, or to restore locomotion. This article reviews the field of wearable robotics, its development, applications, and current research trends.
The development of wearable robotics can be traced back to the 1960s for both military and medical applications. The “Hardiman,” [1, 2] developed by General Electric jointly with the Unites States Army/Navy, was the first exoskeleton that could lift 680 kg, and in 1969, Vukobratovic et al. introduced biped locomotion targeting for medical applications [3]. However, due to the technological limitations at that time, those developments did not result in practical use.
More recently advances in computer, sensing, and robotics technologies have facilitated the realization of practical exoskeleton systems. With support from the military, early exoskeletons were initially designed for military applications, such as XOS 2, MIT Exoskeleton, Berkeley Lower Extremity Exoskeleton (BLEEX), Human Universal Load Carrier (HULC), and Hercule V3. Some of these technologies have been applied for other non-military applications, including manufacturing, construction, fire-fighting, disaster response, rescue operation, and healthcare. For example, MS-02 PowerLoader, PLL-04 PowerLoader Lite (Ninja), BLEEX, and MIT Exoskeleton have been used to enable workers to carry and handle heavy weight objects. Hybrid Assistive Limb (HAL), HONDA Walking Assist Device, and HONDA Bodyweight Support Assist have been developed to provide physical support to the wearer who is suffering from hemiplegia or muscular weakness. ReWalk, REX Rehab, REX Personal, and Ekso are designed to enable paraplegic or quadriplegic people to walk again by supporting their whole body weight and generating prescribed lower-limb joint displacements that result in walking. ReWalk and HAL have also been used for neurorehabilitation and orthopedic rehabilitation applications [1, 2]. In addition, wearable orthosis for tremor assessment and suppression (WOTAS) is an upper limb wearable robot designed for orthopedic patients mainly used for measuring and suppressing movement disorders such as tremor [4]. Table 1 lists the different wearable robots and their applications.
Active Knee Rehabilitation Orthotic Device (AKROD) and AlterG Bionic Leg [5] are two examples of wearable exoskeletons designed specifically for knee joint rehabilitation. For ankle rehabilitation, two notable examples are the “MIT active ankle-foot orthosis” (MIT-AFOs) [6] and the magneto-rheological fluid (MR) brake AFO [7]. For hand rehabilitation, a number of passive robotic devices have been developed, such as the WaveFlex CPM for finger rehabilitation after stroke and HIT CPM for rehabilitation after hand injuries. On the other hand, several active rehabilitation exoskeleton devices have been proposed by different research groups around the world for fingers and hand rehabilitation [8].
To provide sufficient physical support, exoskeletons are usually built with rigid frames and high power density actuators. With the high power demand, exoskeletons have very limited battery life and can only last for a few hours. The rigid frames, although adjustable, often cannot be perfectly aligned with the joints and muscles, which could result in injuries. To address the issues of power consumption and overcome the limitation of rigid frames, the concept of the active soft exosuit was proposed. Asbeck et al. first proposed a soft cable-driven exosuit, which does not consist of a rigid structure; instead, it is mainly constructed with webbing straps and Bowden cables [9]. Instead of geared motors, another research group has proposed to use pneumatic artificial muscles (McKibben) to deliver the actuation forces [10] and developed the prototype called “Second Skin.” By using elastomer artificial pneumatic muscles, the structure of the suit can be made more compact and lightweight [11]. In addition to advances in actuators, new materials have also been proposed to construct soft wearable robots to improve comfort and wearability. For instance, Kramer et al. proposed the concept of robotic fabric, which is a cotton material, weaved with flexible polymer sensors and shape memory alloy. As the shape-memory alloy is heated, it will return to its coiled shape and hence the fabric moves and can actuate the structure attached [12].
Based on a similar approach, a lightweight semi-rigid wearable robot is being developed at Imperial College for Parkinson’s tremor suppression. Figure 1 shows the initial design and the system block diagram of the wearable robotic system. By using rigid and soft materials, the lightweight robot can provide sufficient support for dampening tremor. In addition, to address the issue on distinguishing tremor from intended movements, inertial measurement units (accelerometer, gyroscope, and magnetometer) and electromyography (EMG) sensors are integrated in the semi-rigid structure of the wearable robot. The derived contextual information (or intentions) will be fed back to the robotic control to refine the tremor suppression.
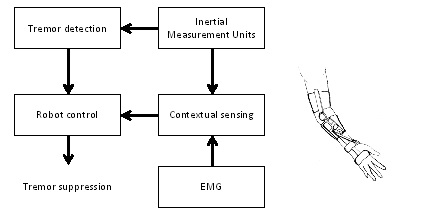
Figure 1: Wearable robot design for Parkinson’s tremor suppression.
Although there are already practical applications and commercial products, the wearable robotic orthesis is a relatively new concept in robotics. Given its potential in providing physical support and assistance to users, the technologies can be applied to a wide range of medical and healthcare applications in addition to rehabilitation and enabling locomotion for physical disabilities. With the rapid advances in wearable technologies and new materials, new forms of wearable robots are emerging, including the exosuit. By using fabric and lightweight actuation materials, wearable robotics can soon become pervasive and appear like normal clothes.
Table 1. Wearable robots and their applications
| Wearable Robots | Type | Applications |
|---|---|---|
| ReWalk | Lower limb | Assist individuals with thoractic-level complete SCI to walk |
| MS-02 PowerLoader | Full body | For nuclear industry use, e.g. clean up work in the Fukushima Daiichi nuclear power plant |
| PLL-04 PowerLoader Lite (Ninja) | Lower limb | For nuclear industry use, e.g. clean up work in the Fukushima Daiichi nuclear power plant |
| Hybrid Assistive Limb (HAL) | Lower limb, full body | Trains doctors and physical therapists, assists the disabled to walk, works to carry heavy loads |
| Berkeley Lower Extremity Exoskeleton (BLEEX) | Lower limb | Military, health, and medical use |
| Wearable orthosis for tremor assessment and suppression (WOTAS) | Lower limb | Tremor suppression |
| MIT Exoskeleton | Lower limb | Military use |
| Active Knee Rehabilitation Orthotic Device (AKROD) | Lower limb | Rehabilitation after stroke |
| Magneto-rheological fluid (MR) brake AFO | Lower limb | Ankle Rehabilitation |
| MIT active ankle-foot orthosis (MIT-AFOs) | Lower limb | Ankle Rehabilitation |
| HONDA Walking Assist Device, HONDA Bodyweight Support Assist | Lower limb | Assist walking for those with muscle weakness and reduce load on leg muscles |
| Human Universal Load Carrier (HULC) | Full body | Military use |
| XOS 2 | Full body | Military use |
| Ekso (formly eLEGS) | Lower limb | Assist patient with difficulties in sitting, walking and standing |
| REX Rehab, REX Personal | Assist patient with high level of mobility impairment, e.g. paraplegics, quadriplegics | |
| Hercule V3 | Lower limb | For manufacturing industries and construction sites use |
| AlterG Bionic Leg | Lower limb | Designed for hemi-paresis, rehabilitation after stroke |
| Soft cable-driven Exosuit developed by Asbeck et al. | Lower limb, soft | Assist walking for healthy individual and those with muscle weakness |
| Second Skin | Lower limb, soft | For rehabilitation of injured nervous systems |
| Mindwalker | Lower limb | Designed for paraplegics to restore locomotion capability |
| EMY (Enhanced Mobility) | Full body | Designed for quadriplegics to restore mobility |
| WaveFlex CPM | Upper limb | Hand rehabilitation |
| HIT CPM | Upper limb | Hand rehabilitation |
| HEXOSYS-I and HEXOSYS-II | Upper limb | Hand rehabilitation |
| Dartmouth Medical Centre exoskeleton | Upper limb | Hand rehabilitation |
| Politecnico di Milano exoskeleton system | Upper limb | Hand rehabilitation |
| Sabanci University exoskeleton | Upper limb | Hand rehabilitation |
| Hong Kong Polytechnic Univeristy exoskeleton | Upper limb | Hand rehabilitation |
| KAIST exoskeleton | Upper limb | Hand rehabilitation |
References
- R. Bogue, “Exoskeletons and robotic prosthetics: a review of recent developments,” Industrial Robot: An International Journal, vol. 36, no. 5, pp. 421-427, 2009
- R. Bogue, C. Loughlin, and C. Loughlin, “Robotic exoskeletons: a review of recent progress,” Industrial Robot: An International Journal, vol. 42, no. 1, 2015.
- M. Vukobratovic, “Dynamics of Biped Locomotion,” in Biped Locomotion, Springer, pp. 1-52, 1990.
- E. Rocon, et al. “Rehabilitation robotics: a wearable exo-skeleton for tremor assessment and suppression,” in Proc. ICRA, 2005.
- C. K. Wong, L. Bishop, and J. Stein, “A wearable robotic knee orthosis for gait training: a case-series of hemiparetic stroke survivors,” Prosthetics and Orthotics International, vol. 36, no. 1, pp. 113-120, 2012.
- J. A. Blaya and H. Herr, “Adaptive control of a variable-impedance ankle-foot orthosis to assist drop-foot gait,” IEEE Trans. Neural Systems and Rehabilitation Engineering, vol. 12, no. 1, pp. 24-31, 2004.
- J. Furusho, et al. “Development of shear type compact MR brake for the intelligent ankle-foot orthosis and its control; research and development in NEDO for practical application of human support robot” in ICORR 2007.
- J. Iqbal and K. Baizid, “Stroke rehabilitation using exoskeleton-based robotic exercisers: Mini Review,” Biomedical Research, vol. 26, no. 1, pp. 197-201, 2015.
- A. T. Asbeck, et al. “Biologically-inspired soft exosuit,” in ICORR, 2013.
- Y.-L. Park, et al., “Design and control of a bio-inspired soft wearable robotic device for ankle–foot rehabilitation,” Bioinspiration & Biomimetics, vol. 9, no. 1, p. 016007, 2014.
- Y.-L. Park, et al. “A soft wearable robotic device for active knee motions using flat pneumatic artificial muscles,” in Proc. ICRA, 2014.
- M. Yuen, et al. “Conformable actuation and sensing with robotic fabric,” in Intelligent Robots and Systems (IROS 2014), 2014.
Contributors
 Denis Huen is an M.Res. candidate in Medical Robotics and Image Guided Intervention at the Hamlyn Centre for Robotic Surgery, Imperial College London. He is interested in fields related to nanotechnology, biomedical engineering, and biologically inspired robotics. Currently, his research focuses mainly on assistive wearable robotics for healthcare applications.
Denis Huen is an M.Res. candidate in Medical Robotics and Image Guided Intervention at the Hamlyn Centre for Robotic Surgery, Imperial College London. He is interested in fields related to nanotechnology, biomedical engineering, and biologically inspired robotics. Currently, his research focuses mainly on assistive wearable robotics for healthcare applications.
Read more
 Jindong Liu is a research fellow at the Hamlyn Centre for Robotic Surgery, Imperial College London. He is interested in fields related to biologically inspired mobile robotics. He obtained a PhD in Computer Science from the University of Essex where he built a biologically inspired autonomous robotic fish. Between 2008-2010, he studied the computational human auditory system and developed a computational mammalian auditory system applied to the sound localization on mobile robotics at University of Sunderland. In 2010, he joined the Hamlyn Centre, Imperial College London. Now he is focusing on natural human-robot speech interaction, pervasive sensing, and medical robots.
Jindong Liu is a research fellow at the Hamlyn Centre for Robotic Surgery, Imperial College London. He is interested in fields related to biologically inspired mobile robotics. He obtained a PhD in Computer Science from the University of Essex where he built a biologically inspired autonomous robotic fish. Between 2008-2010, he studied the computational human auditory system and developed a computational mammalian auditory system applied to the sound localization on mobile robotics at University of Sunderland. In 2010, he joined the Hamlyn Centre, Imperial College London. Now he is focusing on natural human-robot speech interaction, pervasive sensing, and medical robots.
Read more
 Benny Ping Lai Lo is Lecturer at the Hamlyn Centre and the Department of Surgery and Cancer, Imperial College London. Dr. Lo received his PhD in Computing from Imperial College London. His research interests include body sensor networks, pervasive computing, microelectronics, Bayesian networks, computer vision, temporal tracking, machine learning, image segmentation, and wearable robotics.
Benny Ping Lai Lo is Lecturer at the Hamlyn Centre and the Department of Surgery and Cancer, Imperial College London. Dr. Lo received his PhD in Computing from Imperial College London. His research interests include body sensor networks, pervasive computing, microelectronics, Bayesian networks, computer vision, temporal tracking, machine learning, image segmentation, and wearable robotics.
Read more