
Development of An Integrated System for Restoring Over-ground Walking
By Kevin A. Mazurek, Bradley J. Holinski, Dirk G. Everaert, Richard B. Stein, Vivian K. Mushahwar, Ralph Etienne-Cummings
Recent research has demonstrated a control strategy and neural stimulation method that could ultimately lead to restoring over-ground walking capability to individuals with Spinal Cord Injury (SCI).
People with SCI would benefit from an improvement in their quality of life with restored walking function. The ultimate solution would be to regenerate the neural connections damaged due to the SCI and restore the lost communication between the brain and limbs. However despite recent progress, this approach is still beyond our scientific reach, leading to alternative solutions (e.g., exoskeletons, rehabilitation work) to restore function. Our group has focused on utilizing function electrical stimulation (FES), which activates muscles and neurons below the lesion with pulses of electrical current. Restoring walking to its pre-injury level is a nontrivial task because it requires the generation of forces sufficient for body support, forward propulsion, and maintenance of balance during each step. Additionally, these coordinated movements must be maintained for long durations without the subject succumbing to fatigue. For a system utilizing FES to restore walking, the goal would be to develop a system which restores a wide range of mobility modalities while requiring minimal extraneous hardware. The work by this group highlights a novel FES technique involving the stimulation of the spinal cord to restore forceful movements capable of producing over-ground walking.
A novel stimulation technique called intraspinal microstimulation (ISMS) involves inserting fine microwires with a diameter of 30µm (thinner than a human hair) into a small region of the spinal cord responsible for activating the muscles involved in over-ground walking. The lumbosacral region of the spinal cord contains these neural circuits capable of producing walking movements. If the injury site causing a SCI occurred at a high enough level, ISMS can electrically activate the intact circuits responsible for locomotion. One benefit to using ISMS for restoring walking compared to using surface electrodes or intramuscular stimulation (IMS) is that ISMS requires lower stimulation current levels to evoke similar responses (µA compared to mA). In addition, ISMS appears to generate fatigue resistant movements which would allow the patient to walk longer distances than with intramuscular stimulation (IMS). On the other hand, ISMS produces fatigue resistant walking because the target motor neurons are recruited in a natural manner.
Research has been underway towards developing a system which can utilize the benefits of ISMS for restoring over-ground walking. These experiments involved the in vivo application of ISMS in anesthetized animals to produce sustained standing or over-ground walking. This task requires an appropriate control strategy to produce the different movements of the step cycle as well as adapting to changes in the environment. Healthy individuals utilize a biological controller, typically called a central pattern generator (CPG), which integrates afferent feedback signals and descending commands to ensure that the body does not fall during different modes of gait. Our research has applied similar feedback and feed forward control strategies to what has been observed in biology to restore over-ground walking in an animal using IMS and more recently ISMS. The work by Vogelstein et al in 2008 (IEEE T. Biomedical Circuits and Systems) used an integrated circuit controller consisting of silicon neuron models to produce in vivo over-ground walking using IMS. Sensory feedback in the form of accelerometers and force plates helped drive the transitions between swing and stance in each hind limb. The integrated circuit implemented a minimal model of the spinal circuit responsible for locomotion, whose output were used to active the key muscles in the hind limb of the animal, while the sensory feedback indicating the states of the limbs were used to trigger stance transitions during walking. This was one of the first times the functionality of a closed-loop biological CPG was implemented in silicon and produced successful bipedal over-ground walking in vivo (the front limbs of the animals were suspended in a sling and did not contact the walkway). Furthermore, we have shown that these same types of bio-inspired controllers can be used to generate elegant and efficient human-like stepping in a robotic biped (Russell et al., ISCAS, 2007). However, this work illustrated that more sophisticated CPG circuits including more states were needed to improve the smoothness and robustness of the gait, especially since natural legs are multi-joint limbs with many degrees of freedom required for walking.
More recent work has expanded the control strategy by discretizing the step cycle of each limb into more detailed state descriptions beyond swing and stance ( Mazurek et al in 2012 (J. Neural Engineering). This control strategy used a predetermined timing pattern based on the biological underpinnings of locomotion in addition to sensory feedback rules to help adjust the timed transitions based on the position of the hind limbs. This strategy was tested, producing over-ground walking in anesthetized animals, where the movements of the hind limbs were controlled by an algorithm running on a computer. Sensory signals (from gyroscopes, accelerometers, and force plates) estimated the position of the hind limb and adjusted the stimulation levels in order to produce safe walking. This demonstrated that it was able to produce more successful steps compared to one completely driven by either timing rules only (i.e. open loop) or sensory feedback only (i.e. Vogelstein’s et al., 2008; Guevremont et al., 2007). The success of this control strategy has been translated and integrated onto an integrated circuit for use in the application of ISMS for over-ground walking.
Preliminary results demonstrated that using such a control strategy in conjunction with ISMS can produce over-ground walking trials in an anesthetized animal over long distances without visibly observing the fatigue that was present during the IMS trials. The results of our recent ISMS experiments are to be published at a later date, but are exciting for the future of ISMS as a rehabilitative method for restoring locomotion in individuals with SCI.
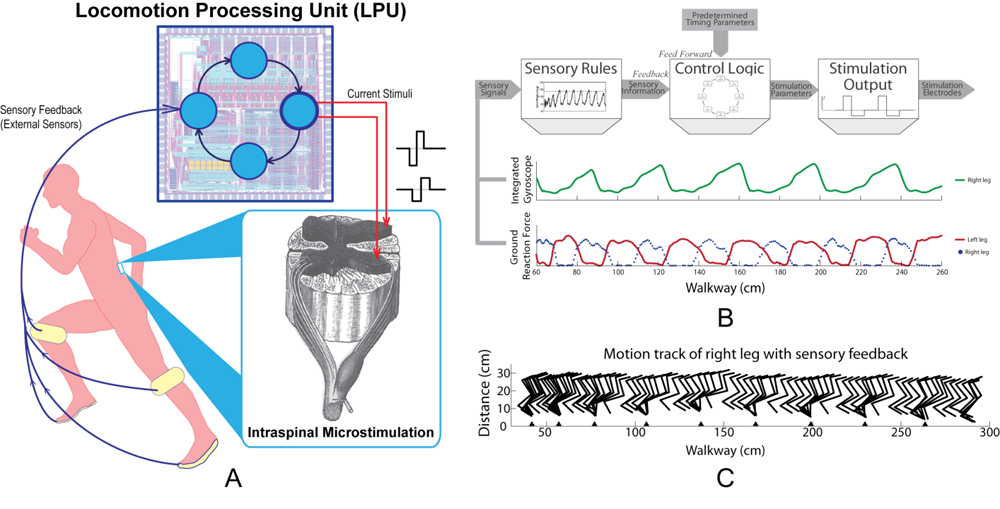
Figure: A. Overview of the LPU integrated circuit and how it would interface with the spinal cord using ISMS. The entire setup can be enclosed without the need for external hardware. B. The experimental setup involves placing an animal on an instrumented walkway where external sensors are recorded and monitored to determine the appropriate stimulation amplitudes during each state of the step cycle. Two traces shown here are ground reaction forces (downward force) of both limbs and gyroscope signal from the right limb, all of which are fed back to the controller to shape the stimulation pattern. C. A stick figure representation of one trial of over-ground walking where IMS was used to target up to 16 different muscles. Sensory feedback was applied to prevent excessive backward extension or forward flexion. Figures adapted from Mazurek et al, Journal of Neural Engineering 2012..
![]()
The next step of this research involves taking these technologies and developing a miniaturized system to implant in a freely roaming animal. A small integrated circuit called the Locomotion Processing Unit (LPU) has been developed which can integrate sensory feedback as well as intrinsic timing control to shape an ISMS waveform for producing walking (Mazurek et al, IEEE BioCAS Conf., 2010). This device uses much of the same concepts which were used in the software version of the controller but operates at power levels suitable for running over a long duration. It utilizes the state based representation of the walking cycle to adjust for different movements, and each state allows for the activation of different stimulating electrodes with adjustable current amplitudes. Incorporating this into the overall experimental system will further enhance the viability of ISMS as a rehabilitative method for restoring mobility and will aid in moving this research outside of a laboratory setting and into a mobile environment.
For Further Reading
V.K. Mushahwar, D.F. Collins, and A. Prochazka, “Spinal Cord Microstimulation Generates Functional Limb Movements in Chronically Implanted Cats,” Experimental Neurology, Vol. 163, No. 2, June 2000, 422-429.
R.J. Vogelstein, F. Tenore, L. Guevremont, R. Etienne-Cummings, and V.K. Mushahwar, “A silicon central pattern generator controls locomotion in vivo,” IEEE Trans. Biomedical Circuits and Systems (BioCAS), Vol. 2, No. 3, 2008, 212-222.
K.A. Mazurek, B.J. Holinski, D.G.Everaert, R.B. Stein, R. Etienne-Cummings, and V.K. Mushahwar, “Feed forward and feedback control for over-ground locomotion in anaesthetized cats,” Journal of Neural Engineering, Vol. 9, No. 2, 2012.
K. Mazurek, B.J. Holinski, D.G. Everaert, R.B. Stein, V.K. Mushahwar, R. Etienne-Cummings, “Locomotion Processing Unit,” Proceedings of IEEE Biomedical Circuits and Systems Conference (BioCAS), Paphos, Cyprus, November 2010, 286-289.
A. Russell, G. Orchard, and R. Etienne-Cummings, “Configuring Spiking Central Pattern Generator Networks with Genetic Algorithms,” Proceedings of IEEE International Symposium on Circuits and Systems (ISCAS), New Orleans, LA, May 2007, 1525-1528.
L. Guevremont, J.A. Norton, and V.K. Mushahwar, “A Physiologically-based Controller for Generating Overground Locomotion using Functional Electrical Stimulation,” Journal of Neurophysiology, Vol. 97, No. 3, March 2007, 2499-2510.
 Pierre DuPont is Staff Scientist, Cardiovascular Surgery; and Chief, Pediatric Cardiac Bioengineering, at Boston Children's Hospital, Boston, MA USA.
Pierre DuPont is Staff Scientist, Cardiovascular Surgery; and Chief, Pediatric Cardiac Bioengineering, at Boston Children's Hospital, Boston, MA USA.  Rajeev Bansal received his PhD in Applied Physics from Harvard University in 1981. Since then he has taught and conducted research in the area of applied electromagnetics at the University of Connecticut.
Rajeev Bansal received his PhD in Applied Physics from Harvard University in 1981. Since then he has taught and conducted research in the area of applied electromagnetics at the University of Connecticut.  Kevin Mazurek is a graduate student at Johns Hopkins University, working on his Ph.D. in electrical and computer engineering.
Kevin Mazurek is a graduate student at Johns Hopkins University, working on his Ph.D. in electrical and computer engineering.  Bradley J. Holinski is currently a graduate student in Biomedical Engineering at the University of Alberta. He obtained a BSc. in Electrical Engineering at the University of Albeta in 2007.
Bradley J. Holinski is currently a graduate student in Biomedical Engineering at the University of Alberta. He obtained a BSc. in Electrical Engineering at the University of Albeta in 2007.  Dirk G. Everaert received his undergraduate degree in physical therapy from the University of Leuven, Belgium, in 1989.
Dirk G. Everaert received his undergraduate degree in physical therapy from the University of Leuven, Belgium, in 1989.  Richard B. Stein (DPhil, Physiology, Oxford University, Oxford UK, 1966) is currently a Research Professor of Physiology and Biomedical Engineering, University of Alberta, Edmonton, Canada and co-director of the Rehabilitation Neuroscience Group.
Richard B. Stein (DPhil, Physiology, Oxford University, Oxford UK, 1966) is currently a Research Professor of Physiology and Biomedical Engineering, University of Alberta, Edmonton, Canada and co-director of the Rehabilitation Neuroscience Group.  Vivian K. Mushahwar received a B.S. degree in electrical engineering from Brigham Young University, Provo, UT, in 1991, and a Ph.D. in bioengineering from the University of Utah, Salt Lake City, in 1996.
Vivian K. Mushahwar received a B.S. degree in electrical engineering from Brigham Young University, Provo, UT, in 1991, and a Ph.D. in bioengineering from the University of Utah, Salt Lake City, in 1996.  Ralph Etienne-Cummings received a B.Sc. degree in physics from Lincoln University, Oxford, PA, in 1988, and M.S.E.E. and Ph.D. degrees in electrical engineering from the University of Pennsylvania, Philadelphia.
Ralph Etienne-Cummings received a B.Sc. degree in physics from Lincoln University, Oxford, PA, in 1988, and M.S.E.E. and Ph.D. degrees in electrical engineering from the University of Pennsylvania, Philadelphia.