The development of a mobile robot using ER1 technology
By Mohammad Saud Khan
NOTE: This is an overview of the entire article, which appeared in the July/August 2013 issue of IEEE Potentials magazine.
Click here to read the entire article. Find this article and others in the July/August issue of IEEE Potentials here.
Modern-day robots can be found in many places, including factories, mine shafts, and even the ocean floor. As described in this articls, they are being explored within the hospital environment as couriers. The project’s goal was to develop the hardware and software for an intelligent, autonomous mobile robot that could find its way around a hospital by sensing and avoiding obstacles and taking alternate routes if a path was blocked. An intelligent mobile robot could not only increase the efficiency and effectiveness of a hospital, but also help in relieving doctors and nurses of document and sample transportation, allowing them to improve their performance with patients.
The hardware design used in this project was a commercial robot kit called the ER1 Personal Robot System by Evolution Robotics. The robot kit included the control software, aluminum beams and plastic connectors to hold a chassis, two assembled scooter wheels, a Web camera and many other accessories. For the purposes of this project, a rectangular structure was constructed behind the robot to act as a backpack, using the remaining aluminum beams to carry small equipment and a separate compartment for documents.
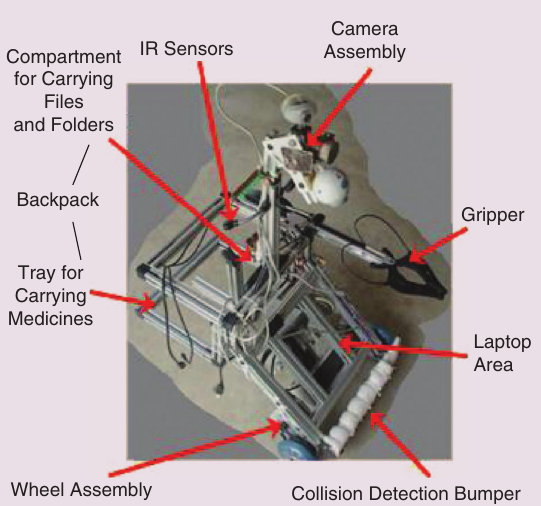
A mini camera mount was also added to control the horizontal motion of the vision camera. The power supply for the camera was taken from the digital outputs of the robot control module. The drive circuitry allowed the camera to move clockwise and counterclockwise.
Using a simple technique, an effective collision detection mechanism was designed. A small circuit using only switches was used as a bump sensor. The two distinct properties of the bumper sensor mechanism were that it had a low activation force, a wide face design, and independent left and right wing contact triggers.
A gripper arm allowed the robot to grasp, transport, and release cans, envelopes, light books, and files. The gripper arm’s design resulted in an easy operation and useful functionality in a single accessory.
The software design allowed for the robot to be able to follow predefined paths and reach a specified goal while avoiding obstacles. The graphical user interface to the Robot Control Center used to program the ER1 robot enabled the ER1 to recognize objects, colors, sound levels, words and do much more. The path planning software had two options – auto mode and manual mode. Auto mode allowed for the shortest path between a start goal and a goal cell around obstacles placed by the user. The main aim of the manual mode was to give an additional option and flexibility for use in the hospital environment.
Experiments with the ER1 showed some problems with the robot’s motion trigger, the required continuous recharging of the laptop battery, and the robot not returning to its original path after avoiding an obstacle. According to the article’s author, future work on this project can be taken in three directions: 1) a department delivery system; 2) an integration of the two modes of operation; and 3) the implementation of behavior-based robotics.
ABOUT THE AUTHOR
Mohammad Saud Khan (mohammad-saud19@gmail.com) is currently a doctoral candidate and researcher working in the area of innovation management and entrepreneurship. He earned a master’s degree in management, technology, and economics from ETH Zurich.
