A Pressure and Strain Sensor Fabricated on Soft Artificial Skin
By Yong-Lae Park, Member, IEEE, Bor-Rong Chen, Member, IEEE, and Robert J. Wood, Member, IEEE
NOTE: This is an overview of the entire article, which appeared in the August 2012 issue of the IEEE Sensors Journal.
Click here to read the entire article.
This article describes the design, fabrication, and calibration of a highly compliant artificial skin sensor. The sensor consists of multilayered mircochannels in an elastomer matrix filled with a conductive liquid, capable of detecting multiaxis strains and contact pressure. A novel manufacturing method comprised of layered molding and casting processes is demonstrated to fabricate the multilayered soft sensor circuit. Silicone rubber layers with channel patterns, cast with 3-D printed molds, are bonded to create embedded microchannels, and a conductive liquid is injected into the microchannels. The channel dimensions are 200 µm (width) x 300 µm (height). The size of the sensor is 25 mm x 25 mm, and the thickness is approximately 3.5 mm. The prototype is tested with a materials tester and showed linearity in strain sensing and nonlinearity in pressure sensing. The sensor signal is repeatable in both cases. The characteristic modulus of the skin prototype is approximately 63 kPa. The sensor is functional up to strains of approximately 250%.
The development of highly deformable artificial skin (Figure A) with contact force (or pressure) and strain sensing capabilities is a critical technology to the areas of wearable computing, haptic interfaces, and tactile sensing in robotics. With tactile sensing, robots are expected to work more autonomously and be more responsive to unexpected contacts by detecting contact forces during activities such as manipulation and assembly. Application areas include haptics, humanoid robotics, and medical robotics.
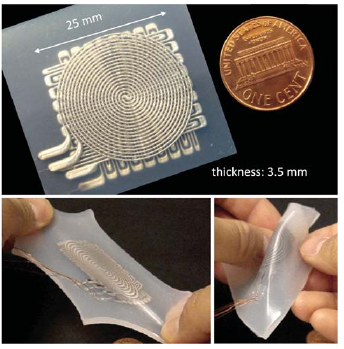
Figure A. Soft artificial skin prototype showing its stretchability and deformability.
Different approaches for sensitive skin have been explored. One of the most widely used methods is to detect structural deformation with embedded strain sensors in an artificial skin. There have been stretchable skin-like sensors proposed using different methods. strains over 100%. In this paper, the authors present a highly deformable artificial robotic skin with multi-modal sensing capable of detecting strain and contact pressure simultaneously, designed and fabricated using the combined concept of hyperelastic strain and pressure sensors with embedded microchannels filled with eutectic gallium-indium (EGaIn)EGaIn, a conductive liquid material.
When the microchannels filled with EGaIn are deformed by either pressing or stretching, the electrical resistance of the microchannels increases due to their reduced cross-sectional areas, increased channel lengths, or both.
The overall design includes three soft sensor layers made of silicone rubber (Figure B) that is highly stretchable and compressible. Layers 1 and 2 have straight-line microchannels with a strain gauge pattern that results in directional sensitivity in axial directions as well as surface pressure sensitivity, and Layer 3 has circular patterned microchannels that are sensitive to surface pressure but are not directionally sensitive to strains along any axis. The layers are cast separately, bonded together, and the microchannels are filled with EGaIn using syringes. Wires are then inserted into the sensors and sealed.
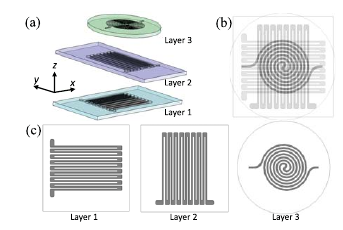
Figure B. Design of the three sensor layers with embedded microchannels. (a) Exploded view. (b) Assembled view. (c) Each sensor layer design (Layer 1: x-axis strain sensing, Layer 2: y-axis strain sensing, and Layer 3: z-axis pressure sensing).
A constant current generator is connected to the three sensors, in series. The resulting three voltages (one per sensor) are amplified and converted to digital signals. A microcontroller then processes these signals to produce x- and y- strain and pressure indications. The paper describes the strain and pressure responses of the resulting artificial skin sensor assembly.
The authors report that while the current design showed linear and repeatable responses in strain sensing, it showed a nonlinear response and a high hysteresis level in pressure sensing, as already modeled. The nonlinearity in pressure sensing is due to the nonlinear areal reduction rate of the rectangular microchannels when contact pressure is applied. Improvement on the linearity in pressure sensing is currently being investigated by changing the channel geometry. The hysteresis could be also reduced by increasing the aspect ratio of the microchannels. Improving linearity and repeatability in pressure sensing is an active ongoing research area.
During fabrication, EGaIn injection in the multi-layered structure through the inter-layer interconnects makes the fabrication process simple. However, it will not be practical for filling an extremely long channel and/or a higher number of channels. A new manufacturing method that does not require the EGaIn injection step is another ongoing effort to enable faster and higher volume production.
ABOUT THE AUTHORS
Yong-Lae Park (M’10) received M.S. and Ph.D. degrees in mechanical engineering from Stanford University, Stanford, CA, in 2005 and 2010, respectively. He is currently a Technology Development Fellow with the Wyss Institute for Biologically Inspired Engineering, Harvard University, Boston, MA. His current research interests include fiber optic force and tactile sensing, design of soft wearable robots for human rehabilitation and artificial skin with embedded soft sensors and actuators, and development of novel manufacturing processes for microrobots and 3-D smart-robot-structures.
Bor-Rong Chen (M’10) received a Ph.D. degree in computer science from Harvard University, Boston, MA. He was a Post-Doctoral Fellow with the Self-organizing Systems Research Group and the Wyss Institute for Biologically Inspired Engineering, Harvard University. He is currently the Chief Technology Officer with Biosensics LLC, Cambridge, MA. His current research interests include wearable sensors, low power embedded systems, and wireless networks.
Robert J. Wood (M’01) received M.S. and Ph.D. degrees from the Department of Electrical Engineering and Computer Sciences, University of California, Berkeley, in 2001 and 2004, respectively. He is currently an Associate Professor with the School of Engineering and Applied Sciences and the Wyss Institute for Biologically Inspired Engineering, Harvard University, Boston, MA. His current research interests include microrobotics and bioinspired robotics.
