Robot-Assisted Needle Steering
Robot-Assisted Needle Steering
By Kyle B. Reed, Ann Majewicz, Vinutha Kallem, Ron Alterovitz, Ken Goldberg, Noah J. Cowan, and Allison M. Okamura
NOTE: This is an overview of the entire article, which appeared in the December 2011 issue of the IEEE Robotics & Automation Magazine.
Click here to read the entire article.
Introduction
Needle insertion is a critical aspect of many medical treatments, diagnostic methods, and scientific studies, and is considered to be one of the simplest and most minimally invasive medical procedures. Robot-assisted needle steering has the potential to improve the effectiveness of existing medical procedures and enable new ones by allowing increased accuracy through more dexterous control of the needle-tip path and acquisition of targets not accessible by straight-line trajectories. This article describes a robot-assisted needle-steering system that uses three integrated controllers: (a) a motion planner concerned with guiding the needle around obstacles to a target in a desired plane, (b) a planar controller that maintains the needle in the desired plane, and (c) a torsion compensator that controls the needle-tip orientation about the axis of the needle shaft. Experimental results from steering an asymmetric-tip needle in the artificial tissue demonstrate the effectiveness of the system and its sensitivity to various environmental and control parameters. The authors show an example of needle steering in ex vivo biological tissue to accomplish a clinically relevant task and highlight challenges of practical needle-steering implementation.
The article points out the difficulties of needle placement in clinical practice – for instance poor placement of a needle tip can result in problems such as false negatives from a biopsy, imprecise delivery of radiation therapy (such as radioactive seeds implanted during brachytherapy), and ablation of healthy tissues instead of cancerous tissues. Also, in some medical procedures, a straight-line path between a feasible insertion site and a desired target is blocked by anatomical structures. Needle steering can be used to avoid these anatomical obstacles, greatly expanding the volume of human tissues that can be safely reached by percutaneous means. This can, in turn, lead to better patient outcomes because needle entry wounds are small – thus greatly accelerating the recovery.
Because needle insertion involves complex mechanical interactions between the needle and tissue, it is difficult for clinicians to use manual manipulation to steer needles. Modeling, planning, and control of needles using robotics-based algorithms and devices are keys to the success of many proposed needle-steering applications. Robot-assisted needle steering is exciting not only due to its potential impact on medicine but also as a source of new research questions in the field of robotics.
This article describes the design, implementation, and experimental evaluation of a system that steers needles based on the tip asymmetry. It also describe avenues for future research by highlighting open research challenges and a method for performing a brachytherapy procedure.
Background
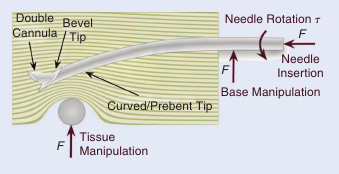
Recently, several methods of controlling a needle inside tissue have emerged, including tip-based steering, base manipulation, and tissue manipulation. These methods are each addressed in the article. Each method has benefits and drawbacks, primarily related to the relationship between steerability and the distance of the needle tip inside the tissue. However, as illustrated in the Figure 1, all of these methods may be combined to enable high steerability at multiple insertion depths while minimizing the tissue damage.
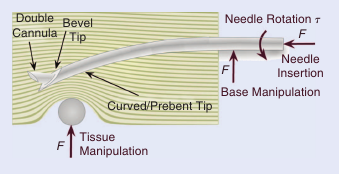
Figure 1. Several different methods of needle steering have been proposed in the literature: asymmetric-tip-based steering, base manipulation, and tissue manipulation.
![]()
Components for Needle Control
The primary software components of a complete asymmetric tip needle steering system are a motion planner, a planar controller, and a torsion compensator. The goal of the planar controller is to maintain the needle in the desired plane. Together, the motion planner and controller are able to specify and control the full 6-DoF pose of the needle tip. The torsion compensator helps reduce the lag effect caused by the long transmission from the base to the tip during axial rotations. Each of these components is described at length in the article.
Experimental Evaluation
The authors describe experiments of continuous insertion designed to determine the influence of each component’s contribution in driving the needle to the desired target. These experiments use artificial tissues to allow consistency from trial to trial. The experiments involve inserting needles into the artificial tissue, to reach a target while avoiding obstacles in the path. The error distance between the desired (target) final location of the needle tip and the actual location is measured and tabulated for a variety of cases in which key parameters are varied.
Proposed Clinical Application
The ultimate goal for robotic needle steering is to enable a clinically relevant task such as biopsy, ablation, or radioactive seed placement. As described earlier, substantial engineering research has demonstrated how to steer and control a needle, but only a few studies have been performed to date demonstrating potential clinical applications of needle steering in the real tissue. The article describes a steerable-needle-based brachytherapy procedure, using a portable system. Brachytherapy is a procedure in which radioactive seeds are inserted into cancerous regions via a specially designed needle. A typical brachytherapy needle consists of a sharp stainless steel stylet surrounded by a stainless steel sheath, through which the seeds are introduced into the tissue after the needle insertion is complete and the stylet is removed. Brachytherapy is commonly used to treat prostate cancer and is also used to treat cancers found in liver and breast tissues.
Portable System
The authors developed a portable needle-steering device, shown in Figure 2, to demonstrate that robot-assisted needle steering can be achieved under medical imaging, as is necessary for clinical procedures. As described in the article, the system was used to insert radioactive seeds into a goat liver.
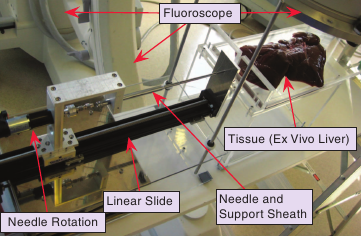
Figure 2. Portable needle steering device is designed to fit under a fluoroscope while allowing control of the needle’s insertion and rotation.
![]()
Needle-Steering Challenges and Opportunities
Recent research has resulted in tremendous advances in the steerability of needles, but the paper describes several areas for future work that need to be addressed before needle steering will be found in clinical practice. Among these areas are:
- the potential for tissue damage
- the impact of tissue membranes on needle placement
- the considerations for having a human operator exerting significant control over the process
ABOUT THE AUTHORS
Kyle B. Reed, Mechanical Engineering, University of South Florida, Tampa, USA. kylereed@usf.edu.
Ann Majewicz, Mechanical Engineering, Stanford University, Stanford, California, USA. Ann.Majewicz@stanford.edu.
Vinutha Kallem, SRI International Sarnoff, Princeton, New Jersey, USA. vinutha.kallem@sri.com.
Ron Alterovitz, Computer Science, University of North Carolina, Chapel Hill, USA. ron@cs.unc.edu.
Ken Goldberg, Industrial Engineering and Operations Research and Electrical Engineering and Computer Sciences, University of California, Berkeley, USA. goldberg@berkeley.edu.
Noah J. Cowan, Mechanical Engineering, Laboratory for Computational Sensing and Robotics, Johns Hopkins University, Baltimore, Maryland, USA. ncowan@jhu.edu.
Allison M. Okamura, Mechanical Engineering, Stanford University, Stanford, California, USA. aokamura@stanford.edu.
