
Robotics to the Rescue: Prosthetic hands help amputees in developing countries
By Dinesh K Kumar
During the IEEE BRC 2013 conference, with the theme of ‘Healthcare for All’, the important role of biosignal and biorobotics to develop robotic hands and help people with upper limb amputation in the developing countries whose only sources of their income is based on the perform of their hands was noted.
Background
Prosthesis devices are very useful as these help millions of amputee people. Recent advancements have resulted in electrically and pneumatically powered prosthesis that provide functionality and the cosmetic look.

Figure 1: Controlling Upper limb Prosthesis devices
Current prosthetic devices
The current state of the art commercially available prosthetic hands are battery powered and myoelectric controlled. Examples are ProDigits™ and i-LIMB™ (Touch Bionics), MYOBOCK SensorHand (Otto Bock), LTI Boston Digital Arm™ System (Liberating Technologies, Inc.), ShadowHand (Shadow Robot Inc.) and the Utah Arm Systems (Motion Control).

Figure 2: Transradial amputee and the modern prosthetic hand
Challenges for Powered Prosthetic Hand
New materials and imaging technology has resulted in these devices being stronger and lighter with the skin of the robotic hand being perfectly matched with that of the user. Miniaturization has led to small, efficient motors and solenoids that can operate each finger individually. However, the user interface to control the device is still a challenge.
Controlling and interfacing with the user has two aspects; the feedback and the command signal. For providing feedback, wireless and micro-sensors technologies have been combined to provide tactile and thermal feedback to the user. The effective options for near natural control of the robotic hand are based on the bioelectric signals from the brain or the muscles.
Brain controlled devices can be used by people who may be have lost control of all their muscles. While surface EEG is non-invasive, it is unspecific, location sensitive, and requires extensive training of the user. It is suitable for simple tasks but unreliable for specific commands. Brain implantable devices are specific, however require extensive surgery. Successful laboratory experiments have been conducted on primates, but translating the technology for wide scale deployment does not appear feasible in the near future.
The use of myoelectric signals is an effective option for people who have active stump muscles. This signal corresponds to the natural intent of the user to contract a muscle, and is a natural and logical choice.
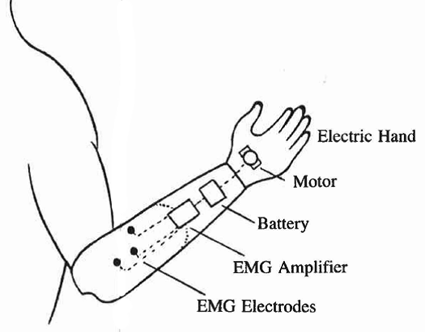
Figure 3: Myoelectric based electric-powered devices [5]
Myoelectric prosthetic control system
Surface electromyogram (sEMG) is the non-invasive recording of the electrical activity of the muscle. To command the robotic hand requires the classification of sEMG signals to identify the desired finger movements. Success in the use of multiple channels sEMG for controlling the prosthetic hand has been reported. Tenore et al. [8] have investigated arrays of 19 and 32 electrodes on able-bodied and trans-radial amputees. However, such systems in the basic approach require complex hardware, are sensitive to electrode placement [3], suffer significant temporal drift and unsuitable for self-administration. A system that has few channels, in which the location of electrodes is not critical, the features of which are stable over the duration of usage of the device and which works in near real time (<300 ms) is highly desirable. However, overlapping muscles and presence of noise and artifacts makes this a challenging task.
Work has been done to reduce the number of electrodes [9] [10] to decode different finger flexions. However, the challenge is because the muscle activity during finger flexion is very low level, comparable to strength of noise and artifacts. None of the global features of sEMG address these fundamental issues and are ineffective for identifying intent of movements such as wrist and finger movements.
Alternate methods have been proposed by Englehart et al [11], Pelvin and Zazula [12] and Arjunan and Kumar [7] based on the decomposition of the signal into motor unit action potentials (MUAP). At very low levels of contraction, the MUAPs are sparse with little overlap and nearly orthogonal. However, these techniques are based on the priori of shape of MUAP, and unsuitable when there are multiple muscles.
The Biosignals team at RMIT is working on an alternate method to estimate the relative strength of contraction of different muscles which is based on the volume transmission properties in body tissues and on the assumption that the MUAP are sparse [11]. MUAP from one muscle have similar magnitudes, and from other muscles have different magnitudes. Wavelet maxima and cluster density determine the relative strength corresponding to different actions.
A Brief of Other Associated Technologies:
Pneumatic Powered Prosthetic Hands: Pneumatic powered hands light-weight, fast and reliable, though currently more expensive.
Artificial Muscles: Design of artificial muscles which can be used to control the individual fingers and wrist movements, are light, and has resulted in these novel prosthetic hands such as by Shadow Robot Company.
Tactile Sensors: The Smart Hand developed by EU researchers has four motors and forty sensors designed to provide realistic motion and tactile sensing for the user.
For Further Reading
[1]. “Artificial right hand,” Europe 1915-1925 http://www.sciencemuseum.org.uk/broughttolife/objects/display.aspx [2]. T.R. Dillingham, L. E. Pezzin, E. J. MacKenzie, “Limb amputation and limb deficiency: epidemiology and recent trends in USA,” South Med J., (2002);95(8):875-83. [3]. A. Esquenazi “Amputation rehabilitation and prosthetic restoration,” Disabil Rehabil. (2004); 26(14-15):831-6. [4]. A. E. Freeland, R. Psonak, “Traumatic below-elbow amputations,” Orthopaedics. 2007;30(2):120-6. [5]. “Upper Limb Prostheses – A Review of the Literature With a Focus on Myoelectric Hands,” WorkSafeBC (2011), www.worksafebc.com/evidence [6]. E. Plevin, D. Zazula, “Decomposition of sEMG using non-linear LMS optimisation of higher-order cumulants,” IEEE Symposium Computer-Based Medical Systems (2002), 32:149 – 154. [7]. S. Arjunan and D. Kumar, “Decoding subtle forearm flexions,” JNER, 7:53 (2010) [8]. F. Tenore, A. Ramos, A. Fahmy, S. Acharya, R. Etienne, N. V.Thakor, “Decoding of Individuated Finger Movements Using sEMG,” IEEE TBME (2009), 56(5):1427 – 1434. [9]. J R. Smith, D. Huberdeau, F. Tenore, N. V. Thakor, “Real- Time Myoelectric Decoding of Individual Finger Movements for a Virtual Target Task,” IEEE EMBS Minneapolis, (2009): 2376 – 2379. [10]. X. Chen, V. Lantz, W. Kong-Qiao, Z. Zhang-Yan, Z. Xu, Y. Ji-Hai, “Feasibility of Building Robust SEMG-based Hand Gesture Interfaces,” IEEE EMBS, (2009):2983 – 2986. [11]. K. Englehart, B. Hudgins, P. A. Parker, “A Wavelet-Based Continuous Classification Scheme for Multifunction Myoelectric Control.” IEEE TBME (2001), 48(3): 302 – 311. Nitish V. Thakor is a Professor of Biomedical Engineering at Johns Hopkins University, Baltimore, USA, as well as the Director of the newly formed institute for neurotechnology, SiNAPSE, at the National University of Singapore.
Nitish V. Thakor is a Professor of Biomedical Engineering at Johns Hopkins University, Baltimore, USA, as well as the Director of the newly formed institute for neurotechnology, SiNAPSE, at the National University of Singapore.  Jerrold L. Vitek is Professor and Head of the Department of Neurology at the University of Minnesota. Dr. Vitek received his medical degree as well as a doctorate of neurophysiology...
Jerrold L. Vitek is Professor and Head of the Department of Neurology at the University of Minnesota. Dr. Vitek received his medical degree as well as a doctorate of neurophysiology...  Subhas Mukhopadhyay graduated from the Department of Electrical Engineering, Jadavpur University, Calcutta, India with a Gold medal and received the...
Subhas Mukhopadhyay graduated from the Department of Electrical Engineering, Jadavpur University, Calcutta, India with a Gold medal and received the...  Nagender Suryadevara received his Bachelor of Technology degree in Computer Science and Engineering from Sri Krishnadevaraya University, Anantapur, India in 1996...
Nagender Suryadevara received his Bachelor of Technology degree in Computer Science and Engineering from Sri Krishnadevaraya University, Anantapur, India in 1996...  Dinesh Kumar graduated from IIT Madras, and later did his PhD from IIT and AIIMS, Delhi. After a successful stint in starting and running a high-tech venture...
Dinesh Kumar graduated from IIT Madras, and later did his PhD from IIT and AIIMS, Delhi. After a successful stint in starting and running a high-tech venture...  Bill Ash is Strategic Program Manager for the IEEE Standards Association (IEEE-SA). He received his BSEE from Rutgers University School of the Engineering.
Bill Ash is Strategic Program Manager for the IEEE Standards Association (IEEE-SA). He received his BSEE from Rutgers University School of the Engineering.  Samuel Sciacca is CEO of SCS Consulting, LLC. He is a registered Professional Engineer and an active Senior Member in IEEE and the IEC in the areas of utility automation...
Samuel Sciacca is CEO of SCS Consulting, LLC. He is a registered Professional Engineer and an active Senior Member in IEEE and the IEC in the areas of utility automation...