
Multigrasp Hand Prosthesis and Myoelectric Control Method for Enhancing the Functional Capability of Upper Extremity Amputees
By Skyler A. Dalley, Daniel A. Bennett, Nasser A. Alshammary, and Michael Goldfarb
Research has been underway to develop a hand prosthesis that allows the user to perform activities that require the dexterity associated with the multiple degrees of freedom in a natural hand. A video illustrates the use of this prosthesis in use.
The human hand is extensively articulated, possessing approximately twenty major degrees of freedom which allow it to execute a wide variety of grasps and postures. In contrast, hand prostheses for upper extremity amputees have traditionally been limited to a single degree of freedom, (single-grasp). While recent technological advances have fueled the emergence of multigrasp prosthetic hands which have enhanced potential to restore normal biomechanical function, the full realization of this potential requires the development of an effective multigrasp control interface which enables the user to access the full capability of the multigrasp prosthesis in an intuitive, reliable, and robust manner. Researchers at Vanderbilt University’s Center for Intelligent Mechatronics are attempting to accomplish this goal.
The researchers have developed a multigrasp myoelectric hand and control structure that enables intuitive control from a standard, two electrode, electromyogram (EMG) interface. The control approach is based on a finite-state model and is enabled by significant leveraging of position and force sensing in the hand, which together provide low-level coordination of grasping and hand postures. In this way, the EMG input from the user need only convey to the prosthesis high-level information regarding direction of motion (i.e. whether the hand is opening or closing) and degree of effort (i.e. the speed with which the hand moves, or the amount of force with which the hand grips). This is made possible due to the structure of the finite-state controller, within which the states (postures and grasps) have been arranged according to the degree of hand closure, and the position of the thumb.
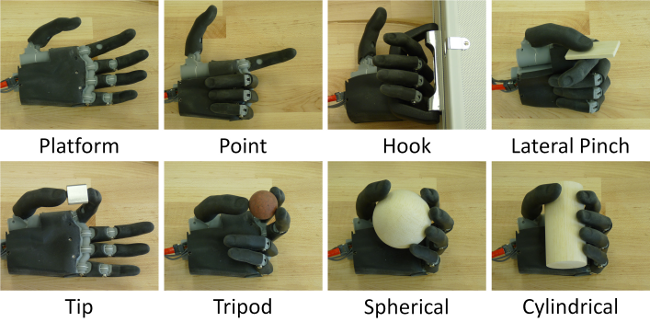
Figure 1: Eight Grasp Types
![]()
The multigrasp myoelectric control method has been implemented on the Vanderbilt multigrasp hand, a prosthetic device which was designed by the team at Vanderbilt to enable a user to perform three precision grasps, three whole-hand grasps, and two functional postures (see Fig. 1) with biomechanically appropriate levels of force and speed. The Vanderbilt multigrasp hand possesses nine degrees of freedom (joints), which are actuated by four motors via polyethylene tendons. Flexion and extension of the thumb and index finger, and opposition and reposition of the thumb, are directly driven (one degree of freedom per motor), allowing for precision grasping of smaller objects. Flexion of the middle, ring, and little fingers, each of which possess two degrees of freedom, is underactuated (several degrees of freedom per motor) and compliantly coupled, allowing for conformal whole-hand grasping of larger objects.
The prosthetic hand and controller developed at Vanderbilt are intended to enhance an amputee’s ability to perform the activities of daily living (ADLs), which largely determines an individual’s level of independence and quality of self-care. To assess this ability, the researchers are performing functional hand assessments with amputees, and investigating the performance of the multigrasp prosthesis and controller relative to commercially available single-grasp and multigrasp devices (see Fig. 2). Preliminary results from this testing indicate that the multigrasp approach affords improved performance in ADLs, relative to other myoelectric devices. The Vanderbilt researchers expect to publish results based on several amputee subjects in the near future. A video of the prosthetic hand performing the grasps can be viewed here.

Figure 2: Functional Hand Assessment
![]()
The authors are with Vanderbilt University, Nashville, TN 37235 (e-mail: {skyler.a.dalley, daniel.a.bennett, nasser.a.alshammary, michael.goldfarb} @vanderbilt.edu).
 Nitish V. Thakor is a Professor of Biomedical Engineering at Johns Hopkins University, Baltimore, USA, as well as the Director of the newly formed institute for neurotechnology, SiNAPSE, at the National University of Singapore.
Nitish V. Thakor is a Professor of Biomedical Engineering at Johns Hopkins University, Baltimore, USA, as well as the Director of the newly formed institute for neurotechnology, SiNAPSE, at the National University of Singapore.  Paolo Bonato, Ph.D., serves as Director of the Motion Analysis Laboratory at Spaulding Rehabilitation Hospital in Boston, MA.
Paolo Bonato, Ph.D., serves as Director of the Motion Analysis Laboratory at Spaulding Rehabilitation Hospital in Boston, MA.  Skyler Ashton Dalley received a B.E. degree in mechanical engineering, in 2007, from Vanderbilt University, Nashville, TN, where he is currently a Ph.D. student in mechanical engineering.
Skyler Ashton Dalley received a B.E. degree in mechanical engineering, in 2007, from Vanderbilt University, Nashville, TN, where he is currently a Ph.D. student in mechanical engineering.  Dan Zondervan holds a B.S in Electrical Engineering from Calvin College, a M.S. in Mechanical Engineering from U.C. Irvine, and is currently pursuing a PhD in Mechanical Engineering.
Dan Zondervan holds a B.S in Electrical Engineering from Calvin College, a M.S. in Mechanical Engineering from U.C. Irvine, and is currently pursuing a PhD in Mechanical Engineering.  David J. Reinkensmeyer received a B.S. degree in electrical engineering from the Massachusetts Institute of Technology in 1988, and M.S. and Ph.D. degrees in electrical engineering...
David J. Reinkensmeyer received a B.S. degree in electrical engineering from the Massachusetts Institute of Technology in 1988, and M.S. and Ph.D. degrees in electrical engineering...